Выбор читателей





Популярные статьи
Трехфазный асинхронный двигатель с короткозамкнутым ротором, устройство и принцип действия.
Потери напряжения и мощности в трехфазной линии.
Ток нейтрального провода в трехфазной цепи является суммой фазных токов. При симметричной нагрузке сумма фазных токов равняется нулю. Таким образом, при симметричной нагрузке отсутствуют потери в нейтральном проводе. Потери напряжения и мощности в линии при трехфазном подключении в шесть раз меньше, чем при однофазном подключении потребителей такой же мощности.
Это первая статья серии исследований асинхронных двигателей. Часть 1: Краткое объяснение некоторых формул и определений переменного тока. Индукционные двигатели - «рабочие лошади» современной промышленности. Это особенно актуально на средних и высоких скоростях, поскольку, как показано в этой статье, коэффициент мощности и эффективность, превышающие 500 об / мин, вполне приемлемы для большинства приложений.
Прочность и простота двигателей с короткозамкнутым ротором делают их первыми, где допустима постоянная скорость. Ежедневные потребности промышленности находят двигатели с короткозамкнутым ротором, заполняющие почти все мыслимые требования к скорости постоянной скорости.
При несимметричной нагрузке нейтральный провод необходим, по нему должен проходить выравнивающий ток. При несимметрии фазных токов появляется ток в нейтральном проводе. Если попытаться включить несимметричную нагрузку без нейтрального провода, получится перекос фаз, при котором на нагруженных фазах напряжение понизится, а на разгруженных появляется перенапряжение. Снижение напряжения нарушает работу потребителей, а перенапряжение может вывести из строя.
В тех случаях, когда требуется регулирование скорости или частая реверсия, или когда необходимо связать высокий управляемый крутящий момент и сверхнизкий пусковой ток, используются асинхронные двигатели намотки ротора. Многие проекты и типы асинхронных двигателей, некоторые из которых чрезвычайно необходимы, необходимы для удовлетворения всех потребностей промышленности. Здесь обсуждаются вопросы строительства, эксплуатации, применения и управления более распространенными.
Один полный набор изменений, положительный и отрицательный, представляет собой один цикл или 360 электрических градусов. Частота - это количество таких изменений в секунду. Идеальный переменный ток представляет собой синусоидальную волну без пульсаций или искажений.
Потери энергии в нейтральном проводе снижают коэффициент полезного действия линии и ухудшается качество электроснабжения. Поэтому с целью получения симметричной нагрузки однофазные потребители стараются равномерно распределять по фазам.
Асинхронный электродвигатель с короткозамкнутым ротором является самым распространенным из электрических двигателей, применяемых в промышленности. Рассмотрим его устройство. На неподвижной части двигателя – статоре – размещается трехфазная обмотка, питаемая трехфазным током. Начала трех фаз этой обмотки выводятся на общий щиток, укрепленный снаружи на корпусе электродвигателя.
Фаза: если электрическая мощность подается по двум цепям, в одном из которых напряжение достигает нуля и других соответствующих значений на 90 градусов позже, чем в другой цепи, услуга является двухфазной. Если подано питание в количестве, равном трем цепям, которые достигают соответствующих значений со 120-градусным интервалом, услуга является трехфазной.
Ампер: Ампер - это удельная скорость потока электрического тока. Сопротивление - это мера помехи или импеданса тока на постоянном токе. Сопротивление измеряется в омах. Закон о фундаментальных омах. Индуктивность: любое устройство с железом в магнитной цепи имеет магнитную инерцию. Эта инерция эффективна при любом изменении тока. Поскольку напряжение и, следовательно, ток всегда изменяются в зависимости от переменного тока, инерционная характеристика, противоположная любому изменению тока, заставляет изменение тока отставать от изменения напряжения.
Собранный сердечник статора укрепляют в чугунном корпусе двигателя. Вращающуюся часть двигателя – ротор – собирают также из отдельных листов стали. В пазы ротора закладывают медные стержни, которые с двух сторон припаивают к медным кольцам.
Таким образом, все стержни оказываются замкнутыми с двух сторон накоротко. Если представить себе отдельно обмотку такого ротора, то она по внешнему виду будет напоминать «беличье колесо». В настоящее время у всех двигателей мощностью до 100 кВт «беличье колесо» делается из алюминия путем заливки его под давлением в пазы ротора. Вал вращается в подшипниках, закрепленных в подшипниковых щитах . Щиты при помощи болтов крепятся к корпусу двигателя. На один конец вала ротора насаживается шкив для передачи вращения рабочим машинам или станкам.
Он также служит для ограничения текущего значения. Этот эффект, известный как индуктивность, измеряется у детей. Индуктивное сопротивление: влияние индуктивности зависит от частоты, и термин «индуктивный реактив» используется для выражения этого эффекта.
Импеданс: в цепях переменного тока поток тока ограничен как сопротивлением, так и индуктивным сопротивлением. Комбинация этих двух элементов известна как импеданс. Математически, когда имеются сопротивление и индуктивное сопротивление. Мощность: электрическая мощность измеряется в ваттах, киловаттах или мегаваттах.
Рассмотрим характеристику, соответствующую режиму двигателя, т.е. при скольжении, изменяющемся от 1 до 0. Обозначим момент, развиваемый двигателем при пуске в ход (S =1) как M пуск. Скольжение, при котором момент достигает наибольшего значения, называют критическим скольжением S кр, а наибольшее значение момента – критическим моментом M кр. Отношение критического момента к номинальному называют перегрузочной способностью двигателя
Ватт является продуктом эффективного тока ампера при давлении одного эффективного вольта. В переменном токе еще одно условие заключается в том, что напряжение и ток должны находиться в фазе, то есть они должны одновременно достигать нуля, максимального положительного и максимального отрицательных значений в тот же момент.
Предполагая, что напряжение и ток находятся в фазе. Если ток и напряжение не находятся в фазе, то есть не достигают соответствующих значений в один и тот же момент времени, результирующим продуктом тока и напряжения является кажущаяся мощность вместо фактической мощности. Видимая мощность измеряется в вольтах-амперах или киловольт-амперах.
M кр /M н =λ.
Критический момент не зависит от активного сопротивления ротора, но зависит от подведенного напряжения. При уменьшении U 1 снижается перегрузочная способность асинхронного двигателя.
Для построения механической характеристики задаются значениями коэффициента скольжения s и определяют по нему соответствующее значение частоты вращения ротора n, а также момент М по формуле Клосса
Видимая мощность измеряется следующим образом. Коэффициент мощности - это коэффициент, при котором кажущаяся мощность умножается для получения фактической мощности. Как указано выше, в большинстве магнитных цепей ток будет отставать от напряжения. Типичный случай представлен на рисунке 4, где ток изменяется на 60 градусов за соответствующими изменениями напряжения. В этой части текущей волны и волны напряжения, когда оба являются положительными или оба отрицательными, результирующая мощность положительна.
Это представлено перекрестием над нулевой линией. Когда текущая волна или волна напряжения отрицательна или другая положительна, результирующая мощность отрицательна. Это представлено заштрихованной областью ниже нулевой линии. Чистая мощность - это положительная область минус отрицательная область. Очевидная мощность - это сумма двух областей. Коэффициент мощности - это чистая мощность, деленная на кажущуюся мощность.
Если в эту формулу подставить вместо M и S номинальные значения момента и скольжения (M н и S н), то можно получить соотношение для расчета критического скольжения.
![]() .
.
Участок характеристики, на котором скольжение изменяется от 0 до S кр, соответствует устойчивой работе двигателя. На этом участке располагается точка номинального режима (M н, S н). В пределах изменения скольжения от 0 до S кр изменение нагрузки на валу двигателя будет приводить к изменению частоты вращения ротора, изменению скольжения и вращающего момента. С увеличением момента нагрузки на валу частота вращения ротора станет меньше, что приведет к увеличению скольжения и электромагнитного (вращающего) момента. Если момент нагрузки превысит критический момент, то двигатель остановится.
Таким образом, коэффициент мощности является фактором, с помощью которого мы умножаем кажущуюся мощность для определения реальной мощности. Математически коэффициент мощности равен косинусу угла, на котором ток отстает от напряжения. На фиг. 4 угловая задержка составляет 60 градусов. Косинус этого угла и, следовательно, соответствующий коэффициент мощности для этого количества запаздывания составляет 50, что соответствует 5 запаздывающим коэффициентам мощности.
Низкий коэффициент мощности нежелателен. Мощность генераторов, трансформаторов, линий электропередачи и линий распределения обычно фиксируется предельными значениями нагрева или допустимым падением напряжения. В любом случае ток обычно является ограничивающим фактором.
Участок характеристики, на котором скольжение изменяется от S кр до 1, соответствует неустойчивой работе двигателя. Этот участок характеристики двигатель проходит при пуске в ход и при торможении.
Пусковой момент - это значение момента в момент трогания ротора.
M п =k м M н,
Где k м - кратность пускового момента.
Обратите внимание, что снижение номинальной скорости или номинальной мощности приводит к снижению коэффициента мощности при всех нагрузках. Изменение линейного напряжения повлияет на коэффициент мощности асинхронных двигателей. В целом можно ожидать следующего.
Таким образом, если коэффициент мощности полной нагрузки двигателя при нормальном напряжении составляет 896, увеличение напряжения на 10% уменьшит коэффициент мощности до. Намагничивающие трансформаторы тока, двигатели и другие устройства с магнитными цепями, содержащими железо, должны быть намагничены для работы. Часто бывает удобно говорить о том, что входной ток имеет два компонента: один компонент нагрузки, который находится в фазе с напряжением, а другой - компонент намагничивания под прямым углом и запаздывание напряжения.
Номинальный момент - значение момента, создаваемое электромагнитным полем на валу двигателя при номинальных параметрах двигателя и номинальных внешних условиях.
Под критическим моментом понимают наивысшее или максимально возможное значение. В случае если момент нагрузки превысит величину критического момента, то двигатель остановится.
Это отставание будет 90 градусов. Компонент нагрузки регистрируется на счетчике ватт-часов и выполняет фактическую работу. Это показано на рисунке 5, где положительная и отрицательная области, представляющие мощность, равны и уменьшаются. За исключением потерь, обмен чистой сетью из-за намагничивающей составляющей равен нулю.
Крутящий момент - это усилие поворота на радиусе фута, выраженное в фунтах. Это показатель способности мотора развивать мощность. Момент запираемого ротора - это минимальный крутящий момент, который двигатель будет развиваться в покое для всех угловых положений ротора, при номинальном напряжении, приложенном к номинальной частоте.
Электромагнитный момент асинхронного двигателя создается взаимодействием тока в обмотке ротора с вращающимся магнитным полем. Электромагнитный момент М пропорционален электромагнитной мощности:
![]() . (13.12)
. (13.12)
Крутящий момент с полной нагрузкой - это момент, необходимый для создания номинальной мощности при полной нагрузке. Ускоряющий крутящий момент - это разница в разнице на любой скорости между крутящим моментом, требуемым внешней нагрузкой, и крутящим моментом, развиваемым двигателем. Этот момент доступен для ускорения двигателя и его подключенной нагрузки.
Момент простоя - это максимальный крутящий момент, который будет развиваться двигателем, с номинальным напряжением, приложенным к номинальной частоте, без резкого падения скорости. Это иногда неправильно называют максимальным крутящим моментом или крутящим моментом.
– угловая синхронная скорость вращения.
Подставив в (13.11) значение электромагнитной мощности по (13.5), получим
![]() , (13.13)
, (13.13)
т. е. электромагнитный момент асинхронного двигателя пропорционален мощности электрических потерь в обмотке ротора .
Если значение тока ротора по выражению (12.25) подставить в (13.13), то получим формулу электромагнитного момента асинхронной машины :
Моменты запуска и пробоя будут меняться в зависимости от квадрата приложенного напряжения. Например, если двигатель имеет 125% пускового момента при полном напряжении, а напряжение снижается до 80% от нормы, результирующий пусковой момент будет. В некоторых случаях пусковой или ускоряющий крутящий момент, доступный при уменьшенном напряжении, может быть недостаточным для запуска или доведения подключенной нагрузки до скорости.
Синхронная скорость - это скорость, с которой мог бы попасть асинхронный двигатель, если не было скольжения. Это скорость, с которой магнитное поле, по сути, вращается вокруг статора. Общие синхронные скорости асинхронного двигателя. Ротор асинхронного двигателя никогда не может работать с довольно синхронной скоростью. Разница между синхронной скоростью и рабочей скоростью известна как проскальзывание. Обычно это выражается в процентах от синхронной скорости.
 . (13.14)
. (13.14)
Параметры схемы замещения асинхронной машины , , и , входящие в выражение (13.14), являются постоянными, так как их значения при изменениях нагрузки машины остается практически неизменными. Также постоянными можно считать напряжение на обмотке фазы статора и частоту . В выражении момента единственная переменная величина – скольжение , которое для различных режимов работы асинхронной машины может принимать разные значения в диапазоне от до (см. рис. 10.1).
Погрузчик с полной нагрузкой варьируется от 1% на больших, высокоскоростных асинхронных двигателях до 3% на малых, низкоскоростных двигателях. Для конкретных применений в двигатель могут быть встроены более высокие значения скольжения. Если линейное напряжение на 10% выше, проскальзывание будет уменьшено примерно на 1 пункт. Если линейное напряжение на 10% меньше, то скольжение будет увеличено примерно на 5 пунктов.
Эффективность - это показатель способности двигателя преобразовывать электрический вход в механический выход. Киловатт является общей единицей электропитания. Мощность - это общая единица механического выхода. Признанные потери асинхронного двигателя.
Рассмотрим зависимость момента от скольжения при , и постоянных параметрах схемы замещения. Эту зависимость принято называть механической характеристикой асинхронной машины. Анализ выражения (13.14), представляющего собой аналитическое выражение механической характеристики , показывает, что при значениях скольжения и электромагнитный момент . Из этого следует, что механическая характеристика имеет максимум.
Внутренний крутящий момент, создаваемый асинхронным двигателем с короткозамкнутым ротором, обусловлен потерями, возникающими в роторе. В случае асинхронного двигателя с раневым ротором также учитываются потери во внешнем резисторе. Потери скольжения также могут быть определены по следующей формуле.
Для двигателя, указанного выше. Изменение линейного напряжения повлияет на эффективность асинхронных двигателей. В общем, можно ожидать следующего. Определение мощности: В некоторых случаях желательно определить приблизительную нагрузку на лошадиную силу, измеряя вход двигателя с помощью вольтметра и амперметра или с ваттметром.
Для определения величины критического скольжения , соответствующего максимальному моменту, необходимо взять первую производную от (13.14) и приравнять ее нулю: . В результате
 . (13.15)
. (13.15)
Подставив значение критического скольжения (по 13.15) в выражение электромагнитного момента (13.14), после ряда преобразований получим выражение максимального момента :
 . (13.16)
. (13.16)
В (13.15) и (13.16) знак плюс соответствует двигательному, а знак минус – генераторному режиму работы асинхронной машины.
Для асинхронных машин общего назначения активное сопротивление обмотки статора намного меньше суммы индуктивных сопротивлений: . Поэтому, пренебрегая величиной , получим упрощенные выражения критического скольжения
![]() , (13.17)
, (13.17)
и максимального момента
![]() . (13.18)
. (13.18)
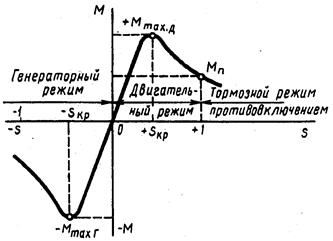
Рис. 65. Зависимость режимов работы асинхронной машины от скольжения
Анализ выражения (13.16) показывает, что максимальный момент асинхронной машины в генераторном режиме больше, чем в двигательном ![]() . На рис. 65 показана механическая асинхронной машины при . На этой характеристике указаны зоны, соответствующие различным режимам работы: двигательный режим , когда электромагнитный момент является вращающим; генераторный режим и тормозной режим противовключением , когда электромагнитный момент М является тормозящим.
. На рис. 65 показана механическая асинхронной машины при . На этой характеристике указаны зоны, соответствующие различным режимам работы: двигательный режим , когда электромагнитный момент является вращающим; генераторный режим и тормозной режим противовключением , когда электромагнитный момент М является тормозящим.
Из (13.14) следует, что электромагнитный момент асинхронного двигателя пропорционален квадрату напряжения сети: . Это в значительной степени отражается на эксплуатационных свойствах двигателя: даже небольшое снижение напряжения сети вызывает заметное уменьшение вращающего момента асинхронного двигателя
. Например, при уменьшении напряжения сети на 10% относительно номинального ![]() электромагнитный момент двигателя уменьшается на 19%: , где – момент при номинальном напряжении сети, а – момент при пониженном напряжении.
электромагнитный момент двигателя уменьшается на 19%: , где – момент при номинальном напряжении сети, а – момент при пониженном напряжении.
Для анализа работы асинхронного двигателя удобнее воспользоваться механической характеристикой , представленной на рис. 66. При включении двигателя в сеть магнитное поле статора, не обладая инерцией, сразу же начинает вращение с синхронной частотой , в то же время ротор двигателя под влиянием сил инерции в начальный момент пуска остается неподвижным и скольжение .
Подставив в (13.14) скольжение , получим выражение пускового момента асинхронного двигателя :
 . (13.19)
. (13.19)

Рис. 66. Зависимость электромагнитного момента асинхронного двигателя от скольжения
Под действием этого момента начинается вращение ротора двигателя, при этом скольжение уменьшается, а вращающий момент возрастает в соответствии с характеристикой . При критическом скольжении момент достигает максимального значения . С дальнейшим нарастанием частоты вращения (уменьшением скольжения) момент начинает убывать, пока не достигнет установившегося значения, равного сумме противодействующих моментов, приложенных к ротору двигателя: момента х.х. и полезного нагрузочного момента (момента на валу двигателя) , т. е.
![]() . (13.20)
. (13.20)
Следует иметь в виду, что при скольжениях, близких к единице (пусковой режим двигателя), параметры схемы замещения асинхронного двигателя заметно изменяют свои значения. Объясняется это в основном двумя факторами: усилением магнитного насыщения зубцовых слоев статора и ротора, что ведет к уменьшению индуктивных сопротивлений рассеяния и , и эффектом вытеснения тока в стержнях ротора, что ведет к увеличению активного сопротивления обмотки ротора . Поэтому параметры схемы замещения асинхронного двигателя, используемые при расчете электромагнитного момента по (13.14), (13.16) и (13.18), не могут быть использованы для расчета пускового момента по (13.19).
Статический момент равен сумме противодействующих моментов при равномерном вращении ротора . Допустим, что противодействующий момент на валу двигателя соответствует номинальной нагрузке двигателя. В этом случае установившийся режим работы двигателя определится точкой на механической характеристике с координатами и ,
где: и – номинальные значения электромагнитного момента и скольжения.
Из анализа механической характеристики также следует, что устойчивая работа асинхронного двигателя возможна при скольжениях меньше критического
, т. е. на участке механической характеристики. Дело в том, что именно на этом участке изменение нагрузки на валу двигателя сопровождается соответствующим изменением электромагнитного момента. Так, если двигатель работал в номинальном режиме ![]() , то имело место равенство моментов:
, то имело место равенство моментов: ![]() . Если произошло увеличение нагрузочного момента до значения , то равенство моментов нарушится, т. е.
. Если произошло увеличение нагрузочного момента до значения , то равенство моментов нарушится, т. е. ![]() , и частота вращения ротора начнет убывать (скольжение будет увеличиваться). Это приведет к росту электромагнитного момента до значения (точка ), после чего режим работы двигателя вновь станет установившимся. Если же при работе двигателя в номинальном режиме произойдет уменьшение нагрузочного момента до значения , то равенство моментов вновь нарушится, но теперь вращающий момент окажется больше суммы противодействующих:
, и частота вращения ротора начнет убывать (скольжение будет увеличиваться). Это приведет к росту электромагнитного момента до значения (точка ), после чего режим работы двигателя вновь станет установившимся. Если же при работе двигателя в номинальном режиме произойдет уменьшение нагрузочного момента до значения , то равенство моментов вновь нарушится, но теперь вращающий момент окажется больше суммы противодействующих: ![]() . Частота вращения ротора начнет возрастать (скольжение будет уменьшаться), и это приведет к уменьшению электромагнитного момента до значения
. Частота вращения ротора начнет возрастать (скольжение будет уменьшаться), и это приведет к уменьшению электромагнитного момента до значения ![]() (точка ); устойчивый режим работы будет вновь восстановлен, но уже при других значениях и .
(точка ); устойчивый режим работы будет вновь восстановлен, но уже при других значениях и .
| Статьи по теме: | |
|
Брак: условия заключения брака, права и обязанности супругов
В последние несколько лет все больше становится популярным так... Складской учет Ведение складского учета в 1с 8
1С: Бухгалтерия 8.2. Понятный самоучитель для начинающих Гладкий Алексей... Пирог с замороженной смородиной – пусть всегда пахнет летом!
Этот пирог можно печь с любыми ягодами, с малиной, вишней, ежевикой, так... | |




