Выбор читателей





Популярные статьи
Вращающий момент двигателя постоянного тока создается взаимодействием магнитного потока индуктора Ф с током якоряI я . При числе параллельных ветвей обмотки якоря 2а сила тока в каждой из них будет равна По формуле вращающий момент, создаваемый каждым стержнем обмотки
Чем больше работы делает двигатель, тем медленнее он вращается. Если человек продолжает увеличивать нагрузку на двигатель, в конечном итоге груз преодолевает мотор и прекращает вращение. Двигатель потребляет определенное количество электрического тока в зависимости от того, сколько нагрузки на него установлено. Когда нагрузка увеличивается на двигателе, чем больше крутящий момент выдает двигатель для его преодоления, тем больше ток двигателя.
Как видно из графиков выше, ток и крутящий момент пропорциональны. Большая крутящая нагрузка означает больший ток, но ток и частота вращения обратные. Чем быстрее вращается двигатель, тем меньше ток он рисует. «Основные» характеристики двигателя. Все двигатели разные, и их свойства меняются в зависимости от их типа, конфигурации и производства.
где D – диаметр якоря и l – активная длина стержня в м . Полный электромагнитный вращающий момент двигателя в ньютонометрах получим, помножив т на число стержней, в обмотке N :
Обозначив полюсное деление через τ, можем написать:
Ток останова - количество тока, которое двигатель будет вытягивать, когда он заглох. Свободный ток - количество тока, которое двигатель будет вытягивать, когда он находится под нагрузкой. Основываясь на вышеуказанных отношениях, можно увидеть, как вступает в действие концепция власти. При заданной нагрузке двигатель может вращаться только с определенной скоростью.
Так как приведенные выше соотношения являются линейными и пропорциональными, это простой вопрос построения графиков крутящего момента и крутящего момента для любого двигателя путем экспериментального определения двух точек на каждом графике. Это означает, что чем больше напряжение будет подано, тем больше мощности будет доступно и чем быстрее двигатель сможет работать.
и окончательно
где
постоянный коэффициент 
Вращающий момент двигателя постоянного тока пропорционален произведению магнитного потока индуктора на ток якоря.
Если двигатель находится под фиксированным количеством нагрузки, а напряжение увеличивается, что он будет делать? Для достижения такого же объема работы доступно больше возможностей. Это означает, что приведенные выше характеристики двигателя изменяются в зависимости от напряжения, приложенного к двигателю, и поэтому они должны быть указаны при заданном напряжении. Фактически, четыре характеристики выше изменяются пропорционально приложенному напряжению.
Можно рассчитать значение одной из этих характеристик при определенном напряжении, если знать характеристику при другом напряжении, умножив известное значение на отношение между напряжениями. Обратите внимание, что это не относится к свободному току двигателя, который является одинаковым при любом напряжении.
Механическая мощность на валу двигателя, согласно равенству , выразится формулой
47
Основной характеристикой для оценки
электромеханических свойств
электродвигателя является механическая
характеристика, представляющая собой
зависимость n=f(М) или  =
f(М). Иногда используется так называемая
скоростная характеристика, представляющая
собой зависимость n=f(I). или
=
f(М). Иногда используется так называемая
скоростная характеристика, представляющая
собой зависимость n=f(I). или =
f(I).
=
f(I). 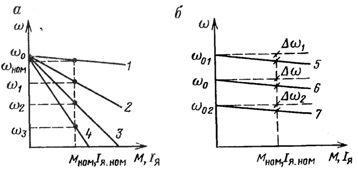
Итак, какие последствия имеют переменное напряжение для контроля? Дизайнер-робот может варьировать напряжение, идущее к двигателю под нагрузкой, чтобы получить разное количество мощности и разную скорость. Это делается с использованием электрических устройств, известных как контроллеры двигателей, которые регулируют напряжение, подаваемое на двигатели.
Означает ли это, что дизайнер может продолжать добавлять напряжение к двигателю, пока он не сможет выдать мощность, необходимую для приложения? Не совсем, потому что у двигателей есть ограничения. Это хорошо, потому что это означает, что двигатели не будут гореть, но это создает новые ограничения для дизайнеров: убедитесь, что двигатели не отключают свои выключатели! При проектировании их систем, чтобы двигатели не потребляли больше тока, чем указанное количество, ограничивая количество нагрузки, которое будет применяться.
Рис. 2. Механические характеристики двигателя постоянного тока при различных сопротивлениях цепи якоря (а) и напряжениях (б)
Изменяя сопротивление реостата в цепи якоря можно получить при номинальной нагрузке различные угловые скорости электродвигателя на искусственных характеристиках - ω1, ω2, ω3
Двигатели
постоянного тока пускаются в ход с
помощью пускового реостата, ограничивающего
пусковой ток. Из уравнения электрического
равновесия ![]()
В приведенном выше примере известный двигатель с известным напряжением управляет известным рычагом робота. В этом сценарии, какой максимальный вес робот может держать в неподвижном состоянии? Чтобы решить эту проблему, дизайнер должен понять, что максимальный вес, который может удерживать робот, происходит при крутящем моменте двигателя. Если двигатель застопорился, он накладывает крутящий момент на 1 Н-м на рычаг робота, длина которого составляет 25 метров.
Рука может удерживать 4 ньютонов в моторном ларьке. И больше, и рука упадет. Нагрузка на крутящий момент, рассчитанная с текущего предела. Это просто, но все усложняется, когда нужно учитывать текущий предел. Скажем, например, в приведенном выше примере в двигателе присутствует ограничивающий ток прерыватель, который отключается, если двигатель потребляет более 2 ампер. Каков максимальный вес, который может удерживать робот без отключения этого выключателя?
![]()
Так как в момент пуска n = 0, то E = с Ф n = 0 и, следовательно
Сопротивление якоря R я очень мало (десятые, а то и сотые доли ома) и потому пусковой ток якоря I яn получается очень большим, во много раз превышающим номинальный. Чтобы ограничить пусковой ток, на время пуска последовательно с якорем включается пусковой реостат R n .
Теперь двигатель не работает при крутящем моменте затяжки - если двигатель находится в режиме ожидания, он будет тянуть ток срабатывания 3 А и отключить автоматический выключатель. Дизайнеру необходимо выяснить, какая крутящая нагрузка должна находиться в двигателе, чтобы поддерживать ток менее 2 ампер. Как это можно сделать?
Рассматривая приведенный выше график и помня, что отношения являются линейными, можно получить уравнение для расчета нагрузки по крутящему моменту при любом заданном токе. Уравнение может быть выражено как. Перестановка для решения для нагрузки на крутящий момент.
В этом случае
Величина сопротивления R n выбирается по допустимому пусковому току якоря, обычно
![]()
По мере разгона двигателя пусковой реостат ступень за ступенью выводится. Металлические проволочные пусковые реостаты входят в комплект поставки двигателя. При пуске двигателя параллельная обмотка возбуждения включается на полное напряжение, то есть регулировочный реостат R peг в цепи параллельной обмотки выводится полностью, пуск осуществляется при максимальном потоке Ф, что увеличивает пусковой момент и облегчает запуск. Реверсирование - изменение направления вращения двигателя - производится путем изменения направления действия вращающего момента. Для этого требуется изменить направление магнитного потока двигателя постоянного тока, т. е. переключить обмотку возбуждения или якорь, при этом в якоре будет протекать ток другого направления. При переключении и цепи возбуждения, и якоря направление вращения останется прежним.
Подключив параметры приведенного выше примера, можно решить проблему крутящего момента, которая приводит к токовому вытягиванию 2 ампер. Основываясь на этом расчете, дизайнер знает, что если крутящий момент, приложенный к двигателю, превышает 655 Н-м, двигатель будет превышать 2 ампер тока, и прерыватель отключится. Осталось только вычислить, сколько силы может быть установлено на руке.
Если рука робота поднимает объект тяжелее 62 Н, он отключает автоматический выключатель двигателя. Скорость двигателя от расчета нагрузки крутящего момента. В приведенном выше примере, как быстро движется двигатель, когда он находится на пределе тока? На основе расчета на предыдущем этапе проектировщику необходимо определить скорость двигателя при нагрузке 655 Н-м.
Министерство образования и науки Российской Федерации
ГОУ ВПО Южно-Уральский государственный университет
Филиал в г. Златоусте
Реферат
Двигатели постоянного тока
ЗД-431.583.270102
Выполнил: Шарипова Ю.Р.
Группа: ЗД-431
Проверил: Румянцев.Е.
Содержание
1. Введение
Рассматривая вышеприведенный график, можно получить уравнение для вычисления скорости двигателя при любой заданной крутящей нагрузке способом, аналогичным текущему уравнению нисходящего потока из последнего примера. При подключении параметров приведенного выше примера можно решить для скорости двигателя при крутящей нагрузке 55 дюймов.
Когда приложение требует больше энергии, чем может работать мотор, дизайнер имеет три варианта.
2. Устройство и принцип действия двигателей постоянного тока
3. Пуск двигателей
4. Технические данные двигателей
5. Кпд двигателей постоянного тока
6 Характеристики двигателя постоянного тока
6.1 Рабочие характеристики
7. Список используемой литературы
Простой способ подумать о том, что двигатели берут на себя характеристики одного супермотора с комбинированными характеристиками отдельных двигателей. Крутящие моменты, токи запирания и свободные токи складываются вместе, но свободная скорость не изменяется.
Крутящую нагрузку на двигатели можно рассчитать следующим образом. Таким образом, в приведенном выше примере потребовалось бы 4 двигателя, чтобы удерживать рычаг. Мы должны знать об этих моторах, если мы собираемся поделиться с ними жизнью. Если вы просто хотите построить игрушечный автомобиль, который может управлять собой, просто управляя им с помощью переключателя, тогда небольшой мотор выполнит работу, но если вам нужно построить лифт гигантского грузовика или промышленного подразделения, тогда нам понадобится чудовищный двигатель для работы такого приложения.
1.Введение
Электрические машины постоянного тока широко применяются в различных отраслях промышленности.
Значительное распространение электродвигателей постоянного тока объясняется их ценными качествами: высокими пусковым, тормозным и перегрузочным моментами, сравнительно высоким быстродействием, что важно при реверсировании и торможении, возможностью широкого и плавного регулирования частоты вращения.
Если вы хотите изучать мотор самостоятельно, вы должны разорвать вентилятор или водяной насос, чтобы добраться до него, или вы можете использовать любой из них по дешевой цене, как только у вас есть мотор, который вам подходит. Но если вы не можете пойти в магазин по некоторым причинам или не можете позволить себе купить его, то вот простая иллюстрация двигателя постоянного тока, которая поможет вам понять основную концепцию двигателя постоянного тока.
Этот дизайн лучше всего понять силы и вращение. Поскольку сила является векторной величиной, она также должна иметь направление. Для нахождения направления этой силы мы применяем правило левой руки Флеминга. Когда арматура помещается в магнитное поле, генерируемое магнитами или обмотками возбуждения, и якорь вращается с использованием постоянного тока, он приводит к генерации механической силы в соответствии с вышеприведенным утверждением.
Электродвигатели постоянного тока используют для регулируемых приводов, например, для приводов различных станков и механизмов. Мощности этих электродвигателей достигают сотен киловатт. В связи с автоматизацией управления производственными процессами и механизмами расширяется область применения маломощных двигателей постоянного тока общего применения мощностью от единиц до сотен ватт.
Мы можем использовать эту силу для выполнения любой конкретной работы, которую мы хотим. Когда арматура вращается в магнитном поле и разрезает магнитные силовые линии, тогда в системе индуцируется ЭДС. Эта ЭДС называется обратной ЭДС, поскольку она противостоит току якоря. Из-за этой обратной ЭДС в процессе теряется энергия.
Этот дизайн лучше всего понять силы и вращение. Поскольку сила является векторной величиной, она также должна иметь направление. Для нахождения направления этой силы мы применяем правило левой руки Флеминга. Когда арматура помещается в магнитное поле, генерируемое магнитами или обмотками возбуждения, и якорь вращается с использованием постоянного тока, он приводит к генерации механической силы в соответствии с вышеприведенным утверждением.
В зависимости от схемы питания, обмотки возбуждения машины постоянного тока разделяются на несколько типов (с независимым, параллельным, последовательным и смешанным возбуждением).
Ежегодный выпуск машин постоянного тока в РФ значительно меньше выпуска машин переменного тока, что обусловлено дороговизной двигателей постоянного тока.
Вначале создавались машины постоянного тока. В дальнейшем они в значительной степени были вытеснены машинами переменного тока. Благодаря возможности плавного и экономичного регулирования скорости вращения двигатели постоянного тока сохраняют свое доминирующее значение на транспорте , для привода металлургических станков, в крановых и подъемно-транспортных механизмах. В системах автоматики машины постоянного тока широко используются в качестве исполнительных двигателей, двигателей для привода лентопротяжных самозаписывающих механизмов, в качестве тахогенераторов и электромашинных усилителей.
2. Устройство и принцип действия двигателей постоянного тока
Устройство машин постоянного тока (генераторов и двигателей) в упрощенном виде показано на рис.1. К стальному корпусу 1 статора машины прикреплены главные 2 и дополнительные 4 полюса. На главных полюсах расположена обмотка возбуждения 3, на дополнительных - обмотка дополнительных полюсов 5. Обмотка возбуждения создает магнитный поток Ф машины.
Рис.1
На валу 10 двигателя закреплен цилиндрический магнитопровод 6, в пазах которого расположена обмотка якоря 7. Секции обмотки якоря присоединены к коллектору 9. К нему же прижимаются пружинами неподвижные щетки 8. Закрепленный на валу двигателя коллектор состоит из ряда изолированных от него и друг от друга медных пластин. С помощью коллектора, и щеток осуществляется соединение обмотки якоря с внешней электрической цепью. У двигателей они, кроме того , служат для преобразования постоянного по направлению тока внешней цепи в изменяющийся по направлению ток в проводниках обмотки якоря.
Дополнительные полюса с расположенной на них обмоткой уменьшают искрение между щетками и коллектором машины. Обмотку дополнительных полюсов соединяют последовательно с обмоткой якоря и на электрических схемах часто не изображают.
Для уменьшения потерь мощности магнитопровод якоря выполнен из отдельных стальных листов. Все обмотки изготовлены из изолированного провода. Кроме двигателей, имеющих два главных полюса, существуют машины постоянного тока с четырьмя и б ό льшим количеством главных полюсов. При этом соответственно увеличивается количество дополнительных полюсов и комплектов щеток.
Если двигатель включен в сеть постоянного напряжения, то при взаимодействии магнитного поля, созданного обмоткой возбуждения, и тока в проводниках якоря возникает вращающий момент, действующий на якорь:
(1)
(2)
где К М - коэффициент, зависящий от конструктивных параметров машины; Ф - магнитный поток одного полюса; I Я - ток якоря.
Если момент двигателя при n = 0 превышает тормозящий момент, которым нагружен двигатель , то якорь начнет вращаться. При увеличении частоты вращения n возрастает индуцируемая в якоре ЭДС. Это приводит к уменьшению тока якоря:
(3)
где r Я - сопротивление якоря.
Следствием уменьшения тока I Я является уменьшение момента двигателя. При равенстве моментов двигателя и нагрузки частота вращения перестает изменяться.
Направление момента двигателя и, следовательно, направление вращения якоря зависят от направления магнитного потока и тока в проводниках обмотки якоря. Чтобы изменить направление вращения двигателя, следует изменить направление тока якоря либо тока возбуждения.
3. Пуск двигателей
Из формулы (3) следует, что в первое мгновение после включения двигателя в сеть постоянного напряжения, т.е. когда и ,
Так как сопротивление r Я невелико, то ток якоря может в 10…30 раз превышать номинальный ток двигателя, что недопустимо, поскольку приведет к сильному искрению и разрушению коллектора. Кроме того, при таком токе возникает недопустимо большой момент двигателя, а при частых пусках возможен перегрев обмотки якоря.
Чтобы уменьшить пусковой ток в цепи якоря, включают пусковой резистор, сопротивление которого по мере увеличения частоты вращения двигателя уменьшают до нуля. Если пуск двигателя автоматизирован, то пусковой резистор выполняют из нескольких ступеней, которые выключают последовательно по мере увеличения частоты вращения.
Пусковой ток якоря
По мере разгона двигателя в обмотке якоря возрастает ЭДС, а как следует из формулы (3), это приводит к уменьшению тока якоря I Я. Поэтому по мере увеличения частоты вращения двигателя сопротивление в цепи якоря уменьшают. Чтобы при сравнительно небольшом пусковом токе получить большой пусковой момент, пуск двигателя осуществляют с наибольшим магнитным потоком. Следовательно, ток возбуждения при пуске должен быть максимально допустимым, т.е. номинальным.
4.Технические данные двигателей
В паспорте двигателя и справочной литературе на двигатели постоянного тока указаны следующие технические данные: номинальные напряжение U и , мощность P н , частота вращения n н, ток I н , КПД.
Под номинальным U н понимают напряжение, на которое рассчитаны обмотка якоря и коллектор, а также в большинстве случаев и параллельная обмотка возбуждения. С учетом номинального напряжения выбирают электроизоляционные материалы двигателя.
Номинальный ток I н – максимально допустимый ток (потребляемый из сети), при котором двигатель нагревается до наибольшей допустимой температуры, работая в том режиме (длительном, повторно-кратковременном, кратковременном), на который рассчитан:
где I ян - ток якоря при номинальной нагрузке; I вн – ток обмотки возбуждения при номинальном напряжении.
Следует отметить, что ток возбуждения I вн двигателя параллельного возбуждения сравнительно мал, поэтому при номинальной нагрузке обычно принимают
Номинальная мощность Р н - это мощность, развиваемая двигателем на валу при работе с номинальной нагрузкой (моментом) и при номинальной частоте вращения n н .
Частота вращения n н, и КПД соответствуют работе двигателя с током I н , напряжением U н без дополнительных резисторов в цепях двигателя.
В общем случае мощность на валу P 2 , момент М и частота вращения n связаны соотношением:
Потребляемая двигателем из сети мощность Р 1 , величины P 2, КПД, U, I связаны соотношениями:
где
Очевидно, что эти соотношения справедливы также и для номинального режима работы двигателя.
5. КПД двигателей постоянного тока
Коэффициент полезного действия является важнейшим показателем двигателей постоянного тока. Чем он больше, тем меньше мощность Р и ток I, потребляемые двигателем из сети при одной и той же механической мощности. В общем виде зависимостьть такова:
(9)
где - потери в обмотке якоря; - потери в обмотке возбуждения; - потери в магнитопроводе якоря; - механические потери.
Потери мощности не зависят, и мало зависят от нагрузки двигателя.
Двигатели рассчитываются таким образом, чтобы максимальное значение КПД было в области, близкой к номинальной мощности. Эксплуатация двигателей при малых нагрузках нежелательна вследствие малых значений r я . Значения КПД двигателей с различными способами возбуждения и мощностью от 1 до 100 кВт при номинальной нагрузке разные и составляют в среднем 0,8.
6.Характеристики двигателей постоянного тока
6.1. Рабочие характеристики
Рабочими называются регулировочная, скоростная, моментная и к.п.д. характеристики.
Регулировочная характеристика
Регулировочная характеристика представляет зависимость скорости вращения П от тока Iв возбуждения в случае, если ток Iа якоря и напряжение U сети остаются неизменными, т. е. n=f(Iв) при Ia=const и U=const.
До тех пор, пока сталь магнитопривода машины не насыщена, поток Ф изменяется пропорционально току возбуждения Iв. В этом случае регулировочная характеристика является гиперболической. По мере насыщения при больших токах Iв характеристика приближается к линейной (рис. 2). При малых значениях тока Iв скорость вращения резко возрастает. Поэтому при обрыве цепи возбуждения двигателя (Iв = 0) с параллельным возбуждением скорость его вращения достигает недопустимых пределов , как говорят: «Двигатель идет вразнос». Исключение могут составлять микродвигатели, которые имеют относительно большой момент М0 холостого хода.
Рис. 2. Регулировочная характеристика двигателя
В двигателях последовательного возбуждения Iв = Iа. При малых нагрузках ток якоря Iа мал и скорость вращения может быть слишком большой, поэтому пуск и работа при малых нагрузках недопустимы. Микродвигатели так же, как и. в предыдущем случае, могут составлять исключение.
Скоростные характеристики.
Скоростные характеристики дают зависимость скорости вращения п от полезной мощности Р2 на валу двигателя в случае, если напряжение U сети и сопротивление rв регулировочного реостата цепи возбуждения остаются неизменными, т. е. n=f(P2), при U=const и rв = const.
Рис. 3. Скоростные характеристики
С возрастанием тока якоря при увеличении механической нагрузки двигателя параллельного возбуждения одновременно увеличивается падения напряжения в якоре и появляется реакция якоря, которая обычно действует размагничивающим образом. Первая причина стремится уменьшить скорость вращения двигателя, вторая - увеличить. Действие падения напряжения в якоре обычно оказывает большее влияние. Поэтому скоростная характеристика двигателя параллельного возбуждения имеет слегка падающий характер (кривая 1, рис. 3).
В двигателе последовательного возбуждения ток якоря является током возбуждения. В результате скоростная характеристика двигателя с последовательным возбуждением имеет характер, близкий к гиперболическому. При увеличении нагрузки по мере насыщения магнитной цепи характеристика приобретает более прямолинейный характер (кривая 3 на рис. 3).
В компаундном двигателе при согласном включении обмоток скоростная характеристика занимает промежуточное положение между характеристиками двигателя параллельного и последовательного возбуждения (кривая 2).
Моментные характеристики.
Моментные характеристики показывают, как изменяется момент М при изменении полезной мощности Р2 на валу двигателя, если напряжение U сети и сопротивление rв регулировочного реостата в цепи возбуждения остаются неизменными, т. е. М = f(P2), при U=const, rв=const.
Полезный момент на валу двигателя
Если скорость вращения двигателя параллельного возбуждения не изменялась бы с нагрузкой, то зависимость момента Ммех от полезной мощности графически представляла бы прямую линию, проходящую через начало координат. В действительности скорость вращения с увеличением нагрузки падает. Поэтому характеристика полезного момента несколько загибается кверху (кривая 2, рис. 4). При этом кривая электромагнитного момента М проходит выше кривой полезного момента Ммех на постоянную величину, равную моменту холостого хода М0 (кривая 1).
Рис. 4. Моментные характеристики
В двигателе последовательного возбуждения вид моментной характеристики приближается к параболическому, так как изменение момента от тока нагрузки происходит, по закону параболы, пока сталь не насыщена. По мере насыщения зависимость приобретает более прямолинейный характер (кривая 4). В компаундном двигателе моментная характеристика (кривая 3) занимает промежуточное положение между характеристиками двигателя параллельного и последовательного возбуждения.
Характеристика изменения коэффициента полезного действия.
Кривая зависимости к. п. д. от нагрузки имеет характерный для всех двигателей вид (рис 5). Кривая проходит через начало координат и быстро растет при увеличении полезной мощности до 1/4 номинальной. При мощности Р2, равной примерно 2/3 номинальной, к. п. д. обычно достигает максимального значения. При увеличении нагрузки до номинальной к. п. д. остается постоянным или незначительно падает.
Рис. 5. Изменение к. п. д. двигателя
6.2 Механическая характеристика
Важнейшей характеристикой двигателя является механическая n(M). Она показывает, как зависит частота вращения двигателя от развиваемого момента. Если к обмоткам двигателя подведены номинальные напряжения и отсутствуют дополнительные резисторы в его цепях, то двигатель имеет механическую характеристику, называемую естественной. На естественной характеристике находится точка, соответствующая номинальным данным двигателя (М н , Р я и т.д.). Если же напряжение на обмотке якоря меньше номинального, либо I в < I вн , то двигатель будет иметь различные искусственные механические характеристики. На этих характеристиках двигатель работает при пуске, торможении, реверсе и регулировании частоты вращения.
Преобразовав выражение (3) относительно частоты вращения, получим уравнение электромеханической характеристики n(I я ):
(7)
После замены в уравнении (7) тока I я согласно формуле (1), получим уравнение механической характеристики n(М):
(8)
При Ф = соnst, электромеханическая n(I я ) и механическая n(М) характеристики двигателя параллельного возбуждения представляют собой прямые линии. Так как за счет реакции якоря магнитный поток немного изменяется, то характеристики в действительности несколько отличаются от прямых.
При работе вхолостую (М = 0) двигатель имеет частоту вращения холостого хода, определяемую первым членом уравнения (8). С увеличением нагрузки n уменьшается. Как следует из уравнения (8), это объясняется наличием сопротивления якоря r я .
Поскольку r я не велико, частота вращения двигателя при увеличении момента изменяется мало, и двигатель имеет жесткую естественную механическую характеристику (рис.6, характеристика 1).
Из уравнения (8) следует, что регулировать частоту вращения при заданной постоянной нагрузке (М = const) можно тремя способами:
а) изменением сопротивления цепи якоря;
б) изменением магнитного потока двигателя;
в) изменением напряжения на зажимах якоря.
Рис. 6 Механические характеристики
Для регулирования частоты вращения первым способом в цепь якоря. должно быть включено добавочное сопротивление r д . Тогда сопротивление в уравнении (8) необходимо заменить на r я + r д .
Как следует из уравнения (8), частота вращения n связана с сопротивлением цепи якоря r я + r д при постоянной нагрузке (М = const) линейной зависимостью, т.е. при увеличении сопротивления частота вращения уменьшается. Разным сопротивлениям r д соответствуют различные искусственные механические характеристики, одна из которых приведена на рис.2 (характеристика 2). С помощью характеристики 2 при заданном моменте М1 можно получить частоту вращения n2.
Изменение частоты вращения вторым способом осуществляется с помощью регулируемого источника напряжения UD2. Изменяя его напряжение регулятором R2, можно изменить ток возбуждения I В и тем самым магнитный поток двигателя. Как видно из уравнения (8), при постоянной нагрузке (М = соnst) частота вращения находится в сложной зависимости от магнитного потока Ф. Анализ уравнения (8) показывает, что в некотором диапазоне изменения магнитного потока Ф уменьшение последнего приводит к увеличению частоты вращения. Именно этот диапазон изменения потока используют при регулировании частоты вращения.
Каждому значению магнитного потока соответствует искусственная механическая характеристика двигателя, одна из которых приведена на рис.2 (характеристика 4). С помощью характеристики 4 при моменте М1 можно получить частоту вращения n4.
Чтобы регулировать частоту вращения изменением напряжения на зажимах якоря, необходимо иметь относительно мощный регулируемый источник напряжения. Каждому значению напряжения соответствует искусственная механическая характеристика двигателя, одна из которых приведена на рис.2 (характеристика 3). С помощью характеристики 3 при заданном моменте М1 можно получить частоту вращения n3.
Список используемой литературы
1. Кацман М.М. Электрические машины. -М.: Высш. шк., 1993.
2. Копылов И.П. Электрические машины . -М.: Энергоатомиздат, 1986
| Статьи по теме: | |
|
Борьба за власть» Екатерина Богданова
(оценок: 1 , среднее: 1,00 из 5) Название: Пансион искусных фавориток.... История Румынской Церкви: церковный аспект Храмы румынии
устройство православного Богословского факультета. Буковинско-Далматская... 1 003 шум общие требования безопасности
Обозначение ГОСТ 12.1.003-83 Заглавие на русском языке Система... | |




