Выбор читателей





Популярные статьи
Рассмотрим более подробно характеристики двигателя параллельного возбуждения, которые определяют его рабочие свойства.
Скоростная и механическая характеристики двигателя определяются равенствами (6) и (7) при U =constиi B =const. При отсутствии дополнительного сопротивления в цепи якоря эти характеристики называются естественными.
В зависимости от типа генерации магнитного поля в машинах постоянного тока выделяются два основных принципа. Электрически возбужденная машина Машина с постоянным магнитом. . В электрически возбужденных машинах токопроводящие катушки генерируют магнитное поле. Если для обмотки возбудителя используется тот же источник напряжения, что и для обмотки, которая генерирует крутящий момент, это называется самовозбуждающейся машиной. Если для обмотки возбуждения используется отдельный источник напряжения, это машина с внешним возбуждением.
Машины с внешним возбуждением позволяют независимую регулировку напряженности поля возбудителя через ток через обмотку возбудителя. Недостатком является то, что требуются два источника напряжения. В станках с постоянными магнитами для генерации поля возбудителя используются постоянные магниты. Сила поля возбуждения постоянна с этими машинами.
(6)
 (7)
(7)
Если щетки находятся на геометрической нейтрали, при увеличении I a потокФ δ несколько уменьшится вследствие действия поперечной реакции якоря. В результате этого скоростьn , согласно выражению (6), будет стремиться возрасти. С другой стороны, падение напряженияR a I a вызывает уменьшение скорости. Таким образом, возможны три вида скоростной характеристики, изображенные на рис 8;1 - при преобладании влияния R a I a ;2 - при взаимной компенсации влияния R a I a и уменьшения;3 - при преобладании влияния уменьшенияФ δ .
В двигателях постоянного тока с внешним возбуждением магнитное поле генерируется электрически независимым источником напряжения. Основные отношения могут быть четко проиллюстрированы на этом двигателе. Полученные знания затем могут быть переданы другим двигателям. Поскольку двигатели постоянного тока с внешним возбуждением требуют двух источников напряжения, они не имеют распределения.
В самовозбуждающемся двигателе постоянного тока обмотка возбуждения для генерации поля и обмотка якоря для генерации крутящего момента подключены к одному и тому же источнику напряжения. Возбуждение закрытия серии возбуждения шунта. . Двигатель называется соответствующим шунтирующим двигателем или серийным двигателем. Возбуждение замыкания серии также называется главной цепью. Шунтирующий двигатель и последовательный двигатель могут питаться от переменного тока, так как магнитное поле меняется одновременно с током.
Ввиду того что изменение Ф δ относительно мало, механические характеристикиn=f(M) двигателя параллельного возбуждения, определяемые равенством (7), приU=constиi B ==constсовпадают по виду с характеристикамиn=f(I a ) (рис. 8). По этой же причине эти характеристики практически прямолинейны.
Характеристики вида 3 (рис. 8) неприемлемы по условиям устойчивости работы. Поэтому двигатели параллельного возбуждения изготовляются со слегка падающими характеристиками вида 1 (рис. 8). В современных высоко использованных машинах ввиду довольно сильного насыщения зубцов, якоря влияние поперечной реакции якоря может быть настолько большим, что получить характеристику вида1 (рис. 8) невозможно. Тогда для получения такой характеристики на полюсах помещают слабую последовательную обмотку возбуждения согласного включения, н. с. которой составляет до 10% от н. с. параллельной обмотки возбуждения. При этом уменьшение Ф δ под воздействием поперечной реакции якоря частично или полностью компенсируется. Такую последовательную обмотку возбуждения называют стабилизирующей, а двигатель с такой обмоткой по-прежнему называется двигателем -параллельного возбуждения.
Поскольку двигатель с возбуждением шунта уже не имеет никакого значения сегодня, он не рассматривается. Его поведение соответствует поведению электродвигателя постоянного тока с внешним возбуждением. Электрически возбужденные двигатели постоянно потребляют электрическую энергию для генерации магнитного поля, что отрицательно сказывается на эффективности двигателя. Этот недостаток избегают постоянных магнитов в статоре, генерирующих требуемое магнитное поле. Наиболее широко используются двигатели постоянного тока с постоянным магнитом в области малых приводов.
И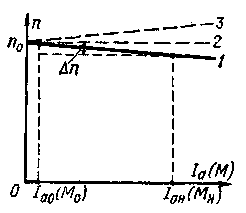 зменение
скорости вращения Δ n (рис. 8) при переходе от холостого хода
(I
a
=
I
a
0
)
к номинальной нагрузке (I
a
=
I
a
н
)
у двигателя параллельного возбуждения
при работе на естественной характеристике
мало и составляет 2-8% отn
н
.
Такие слабо падающие характеристики
называются жесткими. Двигатели
параллельного возбуждения с жесткими
характеристиками применяются в
установках, в которых требуется, чтобы
скорость вращения при изменении нагрузки
сохранялась приблизительно постоянной
(металлорежущие станки и пр.).
зменение
скорости вращения Δ n (рис. 8) при переходе от холостого хода
(I
a
=
I
a
0
)
к номинальной нагрузке (I
a
=
I
a
н
)
у двигателя параллельного возбуждения
при работе на естественной характеристике
мало и составляет 2-8% отn
н
.
Такие слабо падающие характеристики
называются жесткими. Двигатели
параллельного возбуждения с жесткими
характеристиками применяются в
установках, в которых требуется, чтобы
скорость вращения при изменении нагрузки
сохранялась приблизительно постоянной
(металлорежущие станки и пр.).
На рисунке 17 показана базовая структура 4-полюсного двигателя постоянного тока с постоянным магнитом. Показан постоянный двигатель постоянного тока из автомобильной отрасли. 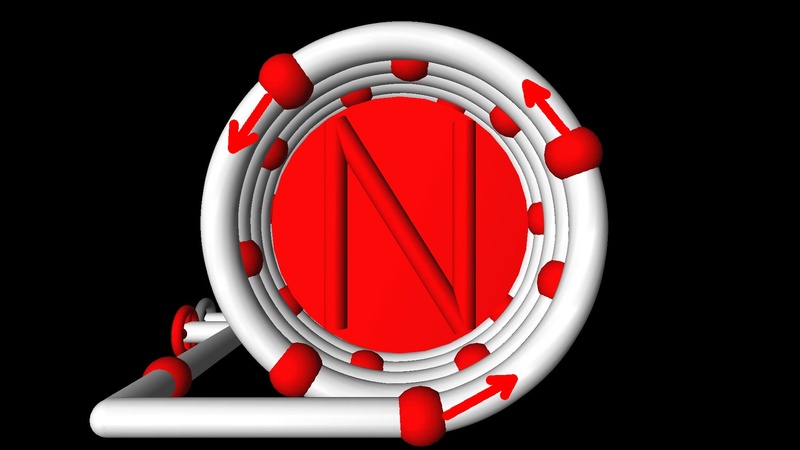
Машина постоянного тока состоит из неподвижной части статора и ротора вращающейся детали, ротора, арматуры. Анкер состоит из вала, на котором сидит пакет анкерных пластин. В канавках пластины якоря находится обмотка якоря, которая пронизана магнитным потоком обмотки поля. Источник питания якоря через скользящие контакты на коллекторе.
Рис. 8. Виды естественных скоростных и механических характеристик двигателя параллельного возбуждения
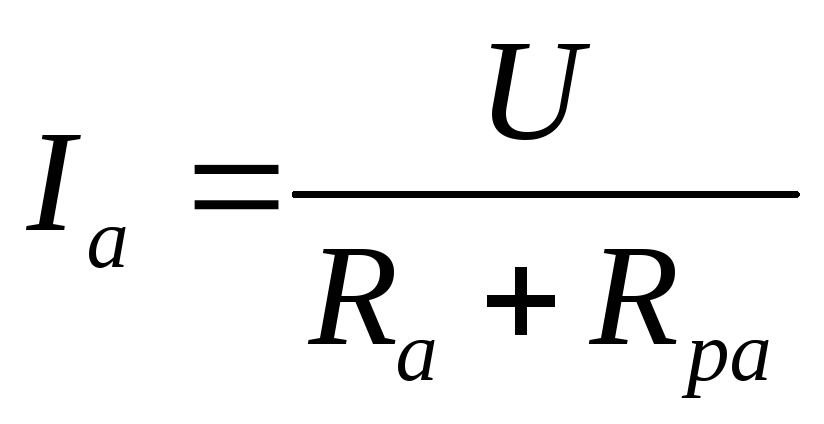
Регулирование скорости посредствам ослабленного магнитного потока производится обычно с помощью реостата в цепи возбуждения R p в (см. рис. 11). При отсутствии добавочного сопротивления в цепи якоря (R pa = 0 ) и U = const характеристики n =f (I a ) и n = f (M ) , определяемые равенствами (6) и (7), для разных значений R р.в. ,I B или Ф δ имеют вид, показанный на рис. 9. Все характеристики n = f (I a ) сходятся на оси абсцисс (n = 0) в общей точке при весьма большом токе I a , который равен
Для охлаждения обычно есть вентилятор на приводном валу. Чтобы настроить скорость, вы изменяете напряжение якоря. При нагрузке скорость падает незначительно, так что индуцированное отрицательное напряжение меньше и ток якоря увеличивается, чтобы обеспечить требуемый крутящий момент. Над номинальной рабочей точкой характеристическая кривая становится нелинейной из-за возникающих потерь. Таким образом, скорость может быть увеличена выше номинальной скорости, но она уменьшает крутящий момент, что еще больше не увеличивает мощность.
Однако механические характеристики пересекают ось абсцисс в разных точках.
Нижняя характеристика на рис. 9 соответствует номинальному потоку. Значения n при установившемся режиме работы соответствуют точкам пересечения рассматриваемых характеристик с кривойМ ст = f (п) для рабочей машины, соединенной с двигателем (штриховая линия на рис. 9).
Максимальная достижимая скорость в операции ослабления поля ограничена центробежными силами, возникающими в арматуре. В очень больших двигателях он проходит через нагрев обмотки возбудителя до уменьшения тока возбуждения и, следовательно, увеличения скорости. Во избежание этого используется вспомогательная обмотка дополнительной серии.
Ведет себя так же, как чужой двигатель. Обмотка возбуждения находится на том же напряжении, что и обмотка якоря, поэтому невозможно ослабление поля. Если двигатель не загружен, ток якоря уменьшается, что приводит к ослаблению поля, так что скорость увеличивается до бесконечности, то есть двигатель проходит. Поэтому серийные двигатели никогда не должны использоваться в нейтральном положении или в сочетании с клиновыми ремнями.
Точка холостого хода двигателя (М = М 0 ,I a = I a 0 ) лежит несколько правее оси ординат на рис. 9. С увеличением скорости вращенияn вследствие увеличения механических потерьМ 0 иI 00 также увеличиваются. Если в этом режиме с помощью приложенного извне момента вращения начать увеличивать скорость вращенияn , тоЕ а = c e Ф δ т будет увеличиваться, аI а иМ будут, согласно равенствам
Однофазный двигатель переменного тока Железнодорожные двигатели Стартеры для двигателей внутреннего сгорания. Двигатель с двойным замыканием представляет собой, по существу, многорядный двигатель с шунтовой вспомогательной обмоткой, что означает, что он имеет высокий момент затяжки, но не работает в режиме пиявки.
Электрическое подъемное оборудование Крановое оборудование Электрические транспортные средства. При нагрузке напряжение источника падает незначительно, потому что внутреннее сопротивление обмотки якоря очень мало. Но ток короткого замыкания недопустимо высок.
 и
и
уменьшаться. При I а = 0 иМ. =0 механические и магнитные потери двигателя покрываются за счет подводимой к валу механической мощности, а при дальнейшем увеличении скоростиI а иМ изменят знак и двигатель перейдет в генераторный режим работы (участки характеристик на рис. 9 левее оси ординат).
Если требуется постоянное напряжение. . Здесь обмотка возбудителя переключается параллельно якорю. Если машина имеет остаточный магнетизм, то это вызвано небольшим напряжением, что приводит к усилению поля возбудителя. Машина самовозбуждается. При нагрузке напряжение на клеммах падает выше, чем в случае генератора с внешним возбуждением, поскольку обмотка возбуждения расположена непосредственно при напряжении клеммы. Поскольку здесь обмотка возбудителя последовательно соединена с обмоткой якоря, при загрузке генератора может возникать только одно поле возбуждения.
Двигатели общего применения допускают по условиям коммутации регулирование скорости ослаблением поля в пределах 1: 2. Изготовляются также двигатели с регулированием скорости таким способом в пределах до 1: 5 или даже 1: 8, но в этом случае для ограничения максимального напряжения между коллекторными пластинами необходимо увеличить воздушный зазор, регулировать поток по отдельным группам полюсов или применить компенсационную обмотку. Стоимость двигателя при этом увеличивается.
По мере увеличения нагрузки напряжение генератора увеличивается. Из-за экстремальной зависимости нагрузки генератор замыкания серии не находит технического применения. Исключением являются двигатели с последовательной резьбой, которые используются для торможения в режиме генератора, все, что необходимо, - это разрушение энергии в тормозном резисторе.
Благодаря комбинации рядов и шунтов, может быть создано особенно независимое от нагрузки напряжение. В качестве возбуждающих машин для синхронных генераторов на электростанциях. Более подробную информацию о электрических машинах можно найти здесь. Функция генератора состоит в том, чтобы генерировать напряжение, когда проводники движутся через магнитное поле, в то время как двигатель служит для создания вращающего момента для вращения для механического вращения. Основные электромеханические отношения, отличающие машину, работающую как генератор машины, работающей как двигатель, можно резюмировать следующим образом.
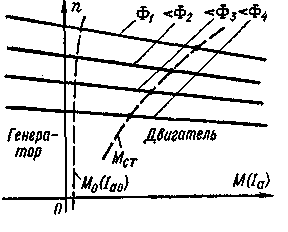
Рис. 9. Механические и скоростные характеристики двигателя параллельного возбуждения при разных потоках возбуждения
Регулирование скорости сопротивлением в цепи якоря, искусственные механическая и скоростная характеристики. Если последовательно в цепь якоря включить добавочное сопротивление R pa (рис. 10, а), то вместо выражений (6) -и (7) получим
Электромагнитный крутящий момент вызывает вращение. Электромагнитный крутящий момент противостоит вращению. Сгенерированное напряжение противоположно току якоря. Генерируемое напряжение ЭДС создает ток якоря. Левое правило используется для определения направления вращения проводников якоря. Две силы действуют, чтобы создать крутящий момент, который заставляет катушку вращаться в по часовой стрелке. Хорошие результаты достигаются при использовании большого количества катушек, как в случае четырехполюсного двигателя.
Когда арматура вращается и проводники отходят от полюса, проходящего через нейтральную плоскость, ток меняет направление в проводниках из-за действия переключателя. Таким образом, проводники под данным полюсом постоянно переносят ток в одном направлении. Наконец, поскольку никакой полезный крутящий момент не создается проводниками в область, небольшой крутящий момент теряется проводниками, которые переключаются. Рисунок 3-1: Применение левого правила для двигателей.
 (8)
(8)
 (9)
(9)
Сопротивление R pa может быть регулируемым и должно быть рассчитано на длительную работу. Цепь возбуждения должна быть включена на напряжение сети.
Электрические двигатели и приводы - Двигатели постоянного тока. Рисунок 3-2: Направление тока в якорных проводниках четырехполюсного двигателя, который вращается против часовой стрелки. Сравнение между эквивалентной схемой генератора и эквивалентной схемой двигателя показывает, что единственное различие заключается в направлении тока в якоре и в линии.
Но эта мощность, создаваемая арматурой, не представляет полезной выходной мощности, поскольку ее часть должна быть израсходована для обеспечения механических или вращательных потерь двигателя. Спецификация выхода двигателя равна входному значению минус потери тепла и потери на вращение.
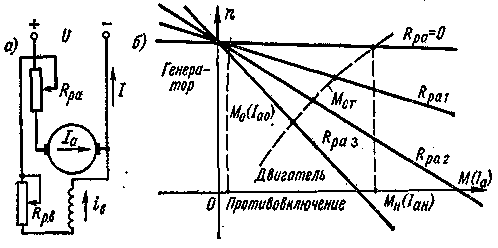
Рис. 10. Схема регулирования скорости вращения двигателя параллельного возбуждения с помощью сопротивления в цепи якоря (а) и соответствующие механические и скоростные характеристики (б)
Характеристики n = f ( M ) иn = f ( I a ) для различных значенийR pa =constприU =constиi B =constизображены на рис. 10, б (R pa 1 < R pa 2 < R pa 3 )- Верхняя характеристика (R pa = 0) является естественной. Каждая из характеристик пересекает ось абсцисс (n = 0) в точкес
Наиболее распространенными единицами для выхода двигателя являются. Скорость задается числом оборотов оси относительно времени и выражается в единицах оборотов в минуту. Уменьшение потока моторного поля приводит к увеличению его скорости. Или, наоборот, увеличение полевого потока приводит к снижению частоты вращения двигателя. Такие утверждения можно проверить простым манипулированием уравнением, в результате.
Поскольку скорость двигателя изменяется с возбуждением поля, удобный способ управления скоростью путем изменения потока потока обычно используется путем регулирования сопротивления в полевой цепи. Регулирование скорости двигателя определяется как: изменение скорости от полной нагрузки до ситуации нулевой нагрузки, выраженное в процентах от номинальной скорости.
 и
и
![]()
Продолжения этих характеристик под осью абсцисс на рис. 10 соответствуют торможению двигателя противовключением. В этом случае n < 0, э.д.с.Е а имеет противоположный знак и складывается с напряжением сетиU , вследствие чего
Если двигатель может поддерживать почти постоянную скорость для разных нагрузок, считается, что двигатель имеет хорошее регулирование скорости. Регулирование скорости двигателя - это разница между скоростью холостого хода двигателя и скоростью двигателя при максимальной нагрузке и выражается в процентах от значения скорости двигателя при максимальной нагрузке.
Базовая скорость - это скорость с максимальной нагрузкой. Регулировка скорости осуществляется путем вставки сопротивления в поле с использованием реостата поля. В положении реостата скорость двигателя остается практически постоянной для всех нагрузок. Необходимо следить за тем, чтобы не открывать полевую схему байпасного двигателя, который работает без нагрузки, потому что скорость двигателя увеличивается неуправляемо до тех пор, пока двигатель не горит. Рисунок 3-4: Характеристики типичного шунтирующего двигателя.
а момент двигателя М действует против направления вращения и является поэтому тормозящим.
Если в режиме холостого хода (I a = I a 0 ) с помощью приложенного извне момента вращения начать увеличивать скорость вращения, то сначала достигается режимI a =0 , а затемI a изменит направление и машина перейдет в режим генератора (участки характеристик на рис. 10, б слева от оси ординат).
Как видно из рис. 10, б, при включении R pa характеристики становятся менее жесткими, а при больших величинахR pa - круто падающими, или мягкими.
Если кривая момента сопротивления M ст = f ( n ) имеет вид, изображенный на рис. 10, б штриховой линией, то значенияn при установившемся режиме работы для каждого значенияR ра определяются точками пересечения соответствующих кривых. Чем большеR pa , тем меньшеn и ниже к. п. д.
Рабочие характеристики представляют собой зависимости потребляемой мощностиР 1 потребляемого токаI , скоростиn , моментаМ и к. п. д.η ] от полезной мощностиР 2 , приU = const и неизменных положениях регулирующих реостатов. Рабочие характеристики двигателя параллельного возбуждения малой мощности при отсутствии добавочного сопротивления в цепи якоря представлены на рис. 11.
О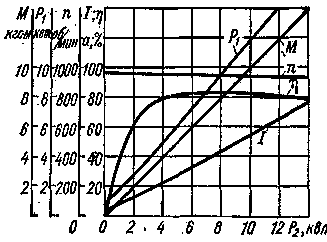 дновременно
с увеличением мощности на валуР
2
растет и момент на валуМ.
Поскольку с увеличениемР
2
иМ
скоростьn
несколько уменьшается, тоМ = Р
2
/п
растет несколько быстрееР
2
.
УвеличениеР
2
иМ
, естественно, сопровождается
увеличением тока двигателяI
.
ПропорциональноI
растет также потребляемая из сети
мощностьР
1
. При
холостом ходе (Р
2
= 0
) к. п. д.η= 0
, затем с
увеличениемР
2
сначалаη
| быстро растет, но при
больших нагрузках в связи с большим
ростом потерь в цепи якоряη
снова начинает уменьшаться.
дновременно
с увеличением мощности на валуР
2
растет и момент на валуМ.
Поскольку с увеличениемР
2
иМ
скоростьn
несколько уменьшается, тоМ = Р
2
/п
растет несколько быстрееР
2
.
УвеличениеР
2
иМ
, естественно, сопровождается
увеличением тока двигателяI
.
ПропорциональноI
растет также потребляемая из сети
мощностьР
1
. При
холостом ходе (Р
2
= 0
) к. п. д.η= 0
, затем с
увеличениемР
2
сначалаη
| быстро растет, но при
больших нагрузках в связи с большим
ростом потерь в цепи якоряη
снова начинает уменьшаться.
Рис. 11 . Рабочие характеристики
двигателя параллельного возбуждения
Р Н = 10 квт, U Н = 220 в, п Н = 950 об/мин
Студенты, аспиранты, молодые ученые, использующие базу знаний в своей учебе и работе, будут вам очень благодарны.
Размещено на http://www.allbest.ru/
Украинская государственная академия железнодорожного транспорта
Центр научно-практической подготовки
з дисциплины "Электротехника"
"Двигатель постоянного тока с параллельным возбуждением"
План
1. Введение
2. Конструкция двигателя постоянного тока
3. Пуск двигателей
4. Технические данные двигателей
5. Характеристики двигателя постоянного тока
6. Механическая характеристика
7. Список используемой литературы
Двигатель постоянного тока (ДПТ) представляет собой преобразователь электрической энергии постоянного тока в механическую. Конструкция двигателя показана на рис.1. Она имеет три основные части: статор (индуктор), якорь и коллектор.
Индуктор (1) - неподвижная часть машины, представляет собой полый литой стальной цилиндр из электротехнической стали, к которому с внутренней стороны болтами крепятся сердечники (полюса). На сердечниках располагается обмотка возбуждения (ОВ), подключаемая к щеткам. Индуктор предназначен для создания основного магнитного поля. Якорь (2) (вращающаяся внутренняя часть машины) представляет собой цилиндр, собранный из стальных листов. В пазах якоря уложена якорная обмотка. На одном валу с якорем закреплен коллектор (3), который представляет собой полый цилиндр, составленный из отдельных медных пластин (ламелей), изолированных друг от друга и от вала якоря и электрически связанных с отдельными частями обмотки якоря. Назначение коллектора - механическое выпрямление переменных синусоидальных ЭДС в постоянное по величине и направлению напряжение, снимаемое во внешнюю цепь с помощью щеток, примыкающих к коллектору. Свойства двигателей постоянного тока, в основном, определяются способом питания обмотки возбуждения. В связи с этим двигатели постоянного тока классифицируют на 2 типа: с независимым возбуждением (рис.2а) и самовозбуждением (рис.2 б, в, г)
Обмотка возбуждения в ДПТ с независимым возбуждением питается от отдельного источника постоянного тока (от полупроводникового выпрямителя, аккумулятора или возбудителя - генератора постоянного тока).
В самовозбуждающихся ДПТ цепи якоря и индуктора электрически связаны, т.е. обмотка возбуждения питается от ЭДС якоря машины.
В зависимости от электрической схемы соединения обмоток якоря и индуктора машины с самовозбуждением делятся еще на три типа: параллельного, последовательного и смешанного возбуждения (рис.2 б, в, г). ДПТ как все электрические машины обратимы, т.е. они без существенных конструктивных
изменений могут работать как в режиме генератора, так и в режиме двигателя. Режим работы ДПТ с параллельным возбуждением. Рассмотрим работу ДПТ с параллельным возбуждением (рис.2б). При включении двигателя в сеть постоянного тока в обеих обмотках возникают токи. При этом в обмотке возбуждения ток возбуждения IВ создает магнитное поле индуктора.
Взаимодействие тока якоря с магнитным полем индуктора создает электромагнитный момент МЭ.
МЭ = сФIЯ, (1)
где с - постоянный коэффициент;
IЯ - ток якоря;
Ф - магнитный поток.
Электромагнитный момент МЭ отличается от момента МВ на валу двигателя на величину момента потерь холостого хода МХХ, которым ввиду малости можно пренебречь и считать, что
В проводниках вращающего якоря индуктируется протво-ЭДС E:
где n - скорость вращения якоря;
k - постоянный коэффициент.
Уравнение электрического равновесия двигателя имеет вид:
U = E + IЯ·RЯ=knФ+ IЯ·RЯ, (3)
где U - напряжение питания сети.
Пуск двигателя в ход
При пуске двигателя якорь в первый момент неподвижен (n = 0) и учитывая (2) ЭДС якоря Е =кnФ=0. При этом согласно (3) пусковой ток якоря IЯП недопустимо велик, т.к. RЯ мало и определяется как:
Поэтому для ограничения пускового тока последовательно в цепь якоря вводится сопротивление пускового реостата RП, который полностью введен перед запуском двигателя и выводится после разгона двигателя по мере возрастания противо - ЭДС (Е).
Такой запуск двигателя предохраняет его якорную обмотку от больших пусковых токов IЯП и позволяет получить в этом режиме максимальный магнитный поток.
Если пуск двигателя осуществляется на холостом ходу, то нет необходимости развивать максимальный вращающий момент МВ на валу. По этому пуск двигателя может быть осуществлен путем плавного увеличения напряжения питания сети U.
Реверсирование двигателя .
Изменение направления вращения двигателя может быть достигнуто изменением тока или в обмотке якоря, или в обмотке возбуждения, т.к. при этом меняется знак вращающего момента. Одновременное изменение направления тока в обоих обмотках направление вращения двигателя не изменяет. Переключение концов обмоток должно производиться только после полной остановки двигателя.
Регулирование скорости вращения .
Из выражения (3) можно определить скорость вращения двигателя:
двигатель постоянный ток питание обмотка
Из формулы (6) видно, что регулировать скорость вращения двигателя постоянного тока можно изменением напряжения сети, магнитного потока возбуждения и сопротивления цепи якоря. Наиболее распространенный способ регулирования скорости вращения двигателя - изменение магнитного потока посредством регулировочного реостата в цепи возбуждения.
Уменьшение тока возбуждения ослабляет магнитный поток и увеличивает скорость вращения электродвигателя. Этот способ экономичен, т.к. ток возбуждения (в двигателях параллельного возбуждения) составляет 3-5% от IН якоря, и тепловые потери в регулировочном реостате весьма малы. Основные характеристики двигателя постоянного тока с параллельным возбуждением
Работа двигателя постоянного тока с параллельным возбуждением оценивается следующими основными характеристиками:
Характеристика холостого хода: (рис.3)
n0 = ѓ (IВ), при U = UН = const и IЯ = I0,
где n0 - скорость вращения на холостом ходу (без нагрузки),
I0 - ток холостого хода составляющий 5 - 10% IН;
UН - номинальное значение напряжения питающей сети.
Учитывая, что на холостом ходу произведение IЯRЯ мало по сравнению с U, то из (6) скорость двигателя определяется обратной зависимостью к магнитному потоку Ф:
При увеличении тока в обмотке возбуждения магнитный поток изменяется по кривой намагничивания Ф = ѓ (IВ), поэтому зависимость между скоростью вращения двигателя n и током возбуждения IВ имеет почти гиперболический характер. При малых значениях тока возбуждения обороты меняются почти обратно пропорционально. При больших токах возбуждения начинает
сказываться магнитное насыщение стали полюсов, и кривая становится более пологой и идет почти параллельно оси абсцисс. Резкое изменение - уменьшение тока возбуждения, а также случайный обрыв цепи возбуждения согласно (9) могут вызвать "разнос" двигателя (при IВ > 0, а следовательно Ф также стремится к 0, n > ?).
Механическая характеристика. Это зависимость скорости вращения ротора от момента МВ на валу двигателя при неизменном напряжении питания сети и токе возбуждения:
n=ѓ (МВ), при U = UН = const, IВ = const.
Для двигателя параллельного возбуждения момент МВ пропорционален первой степени тока якоря IЯ. Поэтому механическая характеристика может быть представлена зависимостью n (Iя), которая называется электромеханической или скоростной (рис.4).
К валу двигателя приложена нагрузка (тормозной момент). Согласно (6) при постоянных значениях тока возбуждения уменьшение скорости вращения n является следствием падения напряжения в цепи якоря - IЯ·RЯ и реакции якоря. При увеличении нагрузки скорость вращения уменьшается на незначительную величину, порядка 3-8%. Такая скоростная характеристика называется жесткой. Регулировочная характеристика (рис.5). Это зависимость тока возбуждения IВ от тока якоря IЯ при постоянном напряжении сети U и постоянной скорости вращения n:
IВ = ѓ (IЯ) при U = UН, n = const.
Из анализа внешней характеристики видно, что скорость вращения падает с ростом нагрузки.
Регулировочная характеристика дает возможность судить о том, каким образом, в каких пределах необходимо регулировать ток в обмотке возбуждения, чтобы поддерживать постоянную скорость вращения.
Методика эксперимента
Исследование режимов работы ДПТ с параллельным возбуждением проводятся на
модульном учебном комплексе МУК-ЭП1, который состоит из:
Блока питания двигателя постоянного тока БПП1;
Блока питания асинхронного двигателя БПА1
Электромашинного агрегата МА1-АП.
В качестве исследуемого двигателя постоянного тока использован ПЛ073У3 (220В, 180 Вт,
1500 об/мин). Автоматическая коммутация обмоток двигателя и подключение измерительных
приборов осуществляется в блоке БПП1.
В качестве нагрузки использован асинхронный двигатель (АД) в режиме динамического торможения. Автоматическая коммутация обмоток АД и подключение измерительных приборов к нему осуществляется в блоке БПА1.
Схема работы комплекса после коммутаций блоков представлена на рис.6.
1. Кацман М.М. Электрические машины. - М.: Высш. шк., 1993.
2. Копылов И.П. Электрические машины. - М.: Энергоатомиздат, 1986
Размещено на Allbest.ru
...Принцип работы и устройство генераторов постоянного тока. Электродвижущая сила и электромагнитный момент генератора постоянного тока. Способы возбуждения генераторов постоянного тока. Особенности и характеристика двигателей различных видов возбуждения.
реферат , добавлен 12.11.2009
Регулирование частоты вращения двигателей постоянного тока посредством изменения потока возбуждения. Максимально-токовая защита электропривода. Скоростные характеристики двигателя. Схемы силовых цепей двигателей постоянного тока и асинхронных двигателей.
курсовая работа , добавлен 30.03.2014
Принцип действия генератора постоянного тока. Якорные обмотки и процесс возбуждения машин постоянного тока. Обмотка с "мертвой" секцией. Пример выполнения простой петлевой и волновой обмотки. Двигатель постоянного тока с последовательным возбуждением.
презентация , добавлен 09.11.2013
Конструкция и принцип действия электрических машин постоянного тока. Исследование нагрузочной, внешней и регулировочной характеристик и рабочих свойств генератора с независимым возбуждением. Особенности пуска двигателя с параллельной системой возбуждения.
лабораторная работа , добавлен 09.02.2014
Изучение механических характеристик электродвигателей постоянного тока с параллельным, независимым и последовательным возбуждением. Тормозные режимы. Электродвигатель переменного тока с фазным ротором. Изучение схем пуска двигателей, функции времени.
лабораторная работа , добавлен 23.10.2009
Принцип работы и устройство генератора постоянного тока. Типы обмоток якоря. Способы возбуждения генераторов постоянного тока. Обратимость машин постоянного тока. Двигатель параллельного, независимого, последовательного и смешанного возбуждения.
реферат , добавлен 17.12.2009
Конструкция двигателя постоянного тока. Сердечник главных плюсов, тип и шаг обмотки якоря. Количество витков обмотки, коллекторных пластин, пазов. Характеристика намагничивания двигателя. Масса проводов обмотки якоря и основные динамические показатели.
курсовая работа , добавлен 21.05.2012
Питание двигателя при регулировании скорости изменением величины напряжения от отдельного регулируемого источника постоянного тока. Применение тиристорных преобразователей в электроприводах постоянного тока. Структурная схема тиристорного преобразователя.
курсовая работа , добавлен 01.02.2015
Моделирование пуска двигателя постоянного тока ДП-62 привода тележки слитковоза с помощью пакета SciLab. Структурная схема модели, ее элементы. Паспортные данные двигателя ДП-62, тип возбуждения. Диаграмма переходных процессов, построение графика.
лабораторная работа , добавлен 18.06.2015
Особенности расчета двигателя постоянного тока с позиции объекта управления. Расчет тиристорного преобразователя, датчиков электропривода и датчика тока. Схема двигателя постоянного тока с независимым возбуждением. Моделирование внешнего контура.
| Статьи по теме: | |
|
Брак: условия заключения брака, права и обязанности супругов
В последние несколько лет все больше становится популярным так... Складской учет Ведение складского учета в 1с 8
1С: Бухгалтерия 8.2. Понятный самоучитель для начинающих Гладкий Алексей... Пирог с замороженной смородиной – пусть всегда пахнет летом!
Этот пирог можно печь с любыми ягодами, с малиной, вишней, ежевикой, так... | |




