Выбор читателей





Популярные статьи
Качественный обмен воздуха в помещении в значительной мере влияет на комфорт жизни в квартире. Чистый воздух, сухие стены, мягкий микроклимат в доме напрямую зависит от наличия системы вентиляции. При этом к самой популярной на сегодняшний день системе обмена воздушных потоков в помещении относится принудительная вентиляция, работающая по приточно-вытяжному принципу.
Большинство современных вентиляторов для вытяжных систем снабжаются электродвигателем с регулируемой скоростью вращения. При этом для изменения оборотов вентилятора используют специальные регуляторы, в том числе и частотные системы изменения скорости вращения асинхронного двигателя , который используется как в вытяжных устройствах, так и в различных бытовых приборах в квартире.
Ещё не так давно устройства регулировки скорости вращения асинхронного электродвигателя состояли из простейших ручных выключателей и магнитного реле, благодаря которым можно было только запустить мотор на максимальных оборотах или выполнить полное его отключение.
Любой регулятор оборотов двигателя, в том числе и частотный, предназначен для изменения скорости вращения мотора. При этом основной функцией регулятора скорости является изменение производительности вытяжной системы или другого оборудования. Но помимо этого такие приборы обладают и дополнительными возможностями, о которых не стоит забывать:
Большинство приборов, регулирующих скорость вращения электродвигателя, могут быть использованы как отдельный элемент системы, так и являться дополнением электронного блока управления, бытовым прибором, приводящимся в действие мотором.
 Для изменения скорости вращения как асинхронного, так и любого другого двигателя, используется несколько вариантов регулировки оборотов:
Для изменения скорости вращения как асинхронного, так и любого другого двигателя, используется несколько вариантов регулировки оборотов:
Изменение напряжения даёт возможность использовать достаточно дешёвые устройства для плавной или многоступенчатой регулировки скорости. Если говорить об асинхронных моторах, которые имеют внешний ротор, то для них лучше использовать регулятор сопротивления якоря для изменения оборотов. При этом частотная регулировка позволяет изменять скоростные показатели в достаточно широком диапазоне.
 Устройства регулировки скорости для однофазных, трёхфазных и асинхронных двигателей
различаются по принципиальному изменению оборотов вращения:
Устройства регулировки скорости для однофазных, трёхфазных и асинхронных двигателей
различаются по принципиальному изменению оборотов вращения:
Тиристорные регуляторы скорости используются для однофазных двигателей и позволяют помимо изменения оборотов вращения защищать оборудование от перегрева и перепадов напряжения.
Симисторные устройства могут управлять сразу несколькими электромоторами, работающими как на постоянном, так и переменном токе, но при условии, что параметры мощности не будут превышать предельных значений. Такой способ изменения оборотов один из самых популярных, если необходимо регулировать скорость благодаря изменению показателей напряжения от минимального до номинального значения.
Трёхфазный регулятор, более точный, и снабжается предохранителем, контролирующим, уровень тока. А чтобы снизить шумовые эффекты на низких оборотах устанавливается сглаживающий фильтр, состоящий из конденсатора.
Частотный регулятор скорости для асинхронного двигателя используется при преобразовании входного напряжения в диапазоне от 0 до 480 вольт, а непосредственный контроль оборотов осуществляется благодаря изменению подаваемой электрической энергии. Чаще всего такие регуляторы используются в трёхфазных двигателях, систем кондиционирования и вентиляции достаточно большой мощности.
Также для мощных электромоторов используют регулятор на основе однофазного или трёхфазного трансформатора. Благодаря такому устройству появляется возможность ступенчатой регулировки скорости двигателей. При этом одним трансформатором можно управлять сразу несколькими устройствами в автоматическом режиме.
 Ещё нет так давно встретить частотный регулятор скорости для асинхронного двигателя было практически невозможно, а стоимость таких устройств была неоправданно высокой. При этом основной причиной дороговизны таких устройств было отсутствие качественных транзисторов
и модулей высокого напряжения. Но благодаря разработкам в сфере твердотельных электронных устройств этот вопрос был решён. Вследствие этого рынок электроники заполонили сварочные инверторы , инверторные кондиционеры и частотные преобразователи.
Ещё нет так давно встретить частотный регулятор скорости для асинхронного двигателя было практически невозможно, а стоимость таких устройств была неоправданно высокой. При этом основной причиной дороговизны таких устройств было отсутствие качественных транзисторов
и модулей высокого напряжения. Но благодаря разработкам в сфере твердотельных электронных устройств этот вопрос был решён. Вследствие этого рынок электроники заполонили сварочные инверторы , инверторные кондиционеры и частотные преобразователи.
На сегодняшний день, частотные регуляторы – самый распространённый метод регулировки, мощностных характеристик оборотов и уровня производительности большинства механизмов, которые приводятся в действие асинхронным трёхфазным электродвигателем.
При таком методе изменения скоростных показателей в электродвигателе, к нему подключается специальный частотный регулятор. В большинстве случаев это тиристорные преобразователи частоты. При этом сама регулировка оборотов осуществляется посредством изменения частотных показателей напряжения, которые непосредственно влияют на скорость вращения асинхронного электромотора.
Хочется отметить, что во время снижения частотных показателей падает, и перегрузочная способность электродвигателя и поэтому для компенсации мощностных потерь нужно увеличивать напряжение. При этом величина напряжения зависит от конструктивных особенностей привода. Если регулировка выполняется на моторе, работающем с постоянным уровнем нагрузки на валу , то величина напряжения увеличивается пропорционально падению частоты. Но при увеличении оборотов это недопустимо и может привести к выходу из строя двигателя.
В случае, когда частотная регулировка выполняется на электродвигателе постоянной мощности, то увеличение напряжения производится пропорционально корню квадратному падения частоты. При изменении оборотов в вентиляционных установках подаваемое напряжение изменяется пропорционально квадрату снижения частоты.
Частотные регуляторы скорости для асинхронных электродвигателей – единственно правильный способ изменения оборотов мотора. В первую очередь это обусловлено возможностью изменения скорости в максимально широком диапазоне практически без потери мощности и уменьшения перегрузочных характеристик мотора.
 В качестве элемента системы, автоматического изменения скорости вращения, вентиляционных устройств частотный регулятор обеспечивает контроль функционирования
всего вытяжного механизма. При этом в процессе использования устройства для регулировки оборотов любых, в том числе и асинхронных двигателей, появляются дополнительные шумы, которые можно устранить, только используя трансформаторный регулятор.
В качестве элемента системы, автоматического изменения скорости вращения, вентиляционных устройств частотный регулятор обеспечивает контроль функционирования
всего вытяжного механизма. При этом в процессе использования устройства для регулировки оборотов любых, в том числе и асинхронных двигателей, появляются дополнительные шумы, которые можно устранить, только используя трансформаторный регулятор.
Также кроме шума во время работы электродвигателя на разных скоростях могут появиться электромагнитные помехи, устранить которые можно за счёт экранированного кабеля. При использовании трёхфазного регулятора с шумом проблем не возникает, но обязательна дополнительная установка сглаживающих фильтров. Но вне зависимости от модели используемого регулятора существуют рекомендации по их эксплуатации .
§ 97. РЕГУЛИРОВАНИЕ СКОРОСТИ ВРАЩЕНИЯ ТРЕХФАЗНЫХ АСИНХРОННЫХ ДВИГАТЕЛЕЙ
Число оборотов ротора в минуту определяется следующим выражением:
Из выражения (122) видно, что число оборотов ротора можно регулировать изменением любой из трех величин, определяющих число оборотов ротора, т. е.изменением частоты тока сети f1 числа пар полюсов р и скольжения S.
Регулирование скорости асинхронных двигателей изменением частоты тока сети сложно, так как необходим какой-либо регулирующий преобразователь частоты или генератор. Поэтому такой способ не имеет широкого применения.
Изменение числа полюсов машины возможно либо выполнением на статоре нескольких (обычно двух) обмоток с различным числом полюсов, либо одной обмотки, допускающей переключение на Различное число полюсов. Может быть помещено на статоре две обмотки, каждая из которых допускает переключение на различное число полюсов.
На рис 120 а схематически показаны две катушки одной фазы, соединенные последовательно. Ток, протекая по ним, создает магнитное поле с четырьмя полюсами.
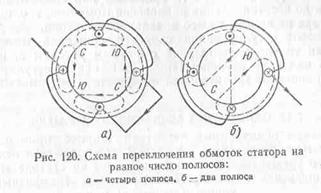
Если изменить направление тока в одной из катушек, включив ее встречно с другой, то обмотка будет создавать двухполюсное магнитное поле (рис. 120, б). При изменении числа полюсов обмотки статора изменится скорость вращения его магнитного поля, а следовательно, и скорость вращения ротора двигателя. Этот способ регулирования скорости асинхронного двигателя экономичен, но недостатком его является ступенчатое изменение скорости. Кроме того, стоимость такого двигателя значительно возрастает вследствие усложнения обмотки статора и увеличения габаритов машин. Регулирование скорости изменением числа полюсов применяется в двигателях с короткозамкнутым ротором; в двигателях с контактными кольцами этот способ не используется, так как здесь одновременно с изменением числа полюсов обмотки статора необходимо в той же мере изменить число полюсов обмотки вращающегося ротора, что весьма сложно.
Заводы СССР выпускают двух-, трех- и четырехскоростные двигатели, например, на синхронные скорости вращения 500-750 - 1000-1500 об/мин. Такие двигатели имеют на статоре две обмотки, каждая из которых допускает переключение на различное число полюсов.
Изменить скольжение можно введением в цепь обмотки ротора регулировочного реостата, а также изменением напряжения сети. При изменении напряжения питающей сети изменяется вращающий момент двигателя, пропорциональный квадрату напряжения. При уменьшении вращающего момента начнет уменьшаться число оборотов ротора, т. е. увеличится скольжение.
Регулировочный реостат включается в цепь обмотки фазного ротора подобно пусковому реостату, но в отличие от пускового этот, реостат рассчитывается на длительное прохождение тока.
При включении регулировочного реостата сила тока в роторе уменьшится, что вызовет уменьшение вращающего момента двигателя и, следовательно, уменьшение скорости вращения или увеличение скольжения. При увеличении скольжения увеличивается э. д. с и ток в роторе. Скорость вращения или скольжения будет изменяться до восстановления равновесия моментов, т. е. пока сила тока в роторе не примет своего начального значения.
Этот способ регулирования скорости вращения может быть использован только в двигателях с фазным ротором и, несмотря на то, что является неэкономичным (так как в регулировочном реостате происходит значительная потеря энергии), имеет широкой применение.
Регулируемый асинхронный привод широко распространен и популярен так, что фактически заменил собой синхронные электродвигатели и привод постоянного тока.
Варианты регулировки скорости электродвигателя включают несколько существующих способов:
Во многом это произошло благодаря появлению частотных преобразователей, обеспечивающих энергетические и динамические показатели. Использование частотного считается самым прогрессивным и востребованным методом, входящим в способы регулировки оборотов вращения асинхронных двигателей.
Основное предназначение, которое выполняет частотный регулятор скорости для асинхронного двигателя основывается на осуществлении питания таким образом, чтобы рабочие характеристики агрегата радикально отличались от обычных параметров, получаемых из сети. При этом напряжение в сети и частота должны остаться неизменными.
Частотный регулятор скорости для асинхронного двигателя будет необычайно актуальным в схемах управления такими приборами, как кондиционеры воздуха, холодильные камеры, электрические вентиляторы, насосы, все оборудование с использованием асинхронных электродвигателей.
В конструкцию частотного регулятора входит несколько элементов, обеспечивающих эффективность работы устройства, к ним относятся:
К преимущественным особенностям использования относятся инновационные технологии векторного управления. Значительная энергосберегающая эффективность – это функция, которая обеспечивается в автоматическом режиме. Управление регулятором скорости можно выполнять с помощью дистанционного пульта управления, минимальное расстояние для управления 5м.
Важно: в конструкции преобразователя частоты предусмотрена возможность автоматически регулировать выходное напряжение.
Среди многообразия устройств, выполняющих функцию управления электродвигателем, существуют две основные разновидности моделей регуляторов оборотов. Это электронные тиристорные однофазные регуляторы скорости, которые работают за счет плавного изменения напряжения питания. Вторая разновидность моделей регуляторов оборотов – трансформаторный однофазный регулятор скорости. Его работа заключается в изменении положения трехступенчатого кулачкового переключателя, с помощью которого происходит изменение комбинации переключения обмоток.
Частотное управление регулированием скоростью асинхронного электродвигателя в наше время является техническим стандартом. Использование частотного регулятора вытеснило очень многие способы управления. Симметричное и несимметричное управление напряжением и использование добавочных сопротивлений, изменение числа пар полюсов ушли в прошлое.
Регулировать скорость вращения асинхронных электродвигателей требуется, например, для: изменения потока воздуха в вентиляционной системе, регулирования производительности различных насосов, изменения скорости движущихся деталей в станках и т.п. Кроме того во многих случаях это позволяет экономить электроэнергию, снизить акустические шумы, установить нужную производительность.
Как мы уже знаем из курса ТОЭ, частота вращения ротора определяется по формуле:
n 2 =n 1 ×(1-s)
Синхронная частота вращения зависит от частоты приложенного напряжения и количества пар полюсов
Исходя из этого, можно сделать вывод, что изменять скорость асинхронных ЭД можно с помощью изменения скольжения, частоты и числа пар полюсов.
Способы регулирования бывают разные, например механические муфты, редукторы, различные шестерёнчатые трансмиссии или есть способ изменения количества полюсов обмоток ЭД. Но в рамках данной статьи поговорим о методах регулировки ЭД с помощью изменения электрических параметров: регулировки напряжения питания ЭД и настройки частоты питающего напряжения и с помощью изменения активного сопротивления в роторной цепи.
Данный метод регулирования скорости асинхронного ЭД широко используется в машинах с фазным ротором. При этом в роторную цепь подсоединяется дополнительный реостат, которым можно достаточно плавно увеличивать номинал сопротивления. С ростом сопротивления, скольжение ЭД увеличивается, а скорость вращения снижается. Т.е, происходит регулировка скорости вниз от естественной характеристики.
Огромным минусом этого метода является его экономическая неэффективность, т.к с ростом скольжения, потери в роторной цепи существенно увеличиваются, т.е,
стремительно падает.
Плюс к этому, механическая характеристика двигателя становится более мягкой и пологой, поэтому незначительное изменение момента нагрузки на валу ЭД, вызывает резкое изменение частоты вращения.
Регулирование скорости ЭД этим способом крайне не эффективно, но, несмотря на это факт, все еще используется в ЭД с фазным ротором.
Этот способ подразумевает включения в питающую цепь автотрансформатора (АТР), перед статорной обмоткой, после питающих проводов. При этом, если понизить уровень напряжения на выходе АТР, то ЭД будет работать на пониженном напряжении.
Регулировка скорости вращения двигателя методом изменения напряжения питания
Это в свою очередь снизит частоты вращения, при постоянном моменте нагрузки, а также к снижению перегрузочной способности ЭД. Так как с снижением уровня питания, максимальный момент асинхронного ЭД снижается в квадрат раз. Кроме этого момент снижается быстрее, чем ток в рроторной цепи, а поэтому, увеличиваются и потери, с последующим нагревом ЭД.
Способ регулировки напряжения, возможен только по направлению вниз от естественной характеристики, так как повышать напряжение выше номинального уровня категорически не приветствуется, ведь это приведет к огромным потерям в двигателе, перегреву и неисправности.
Кроме АТР, можно использовать тиристорный регулятор напряжения и аналогичные схемотехнические решения, в том числе и с использованием микроконтроллеров.
При таком методе, к ЭД подсоединяют преобразователь частоты (ПЧ). Например Omron, Hitachi и т.п,(например в ). В простых вариантах это тиристорный ПЧ. Регулировка скорости происходит с помощью регулировки частоты питающего напряжения f , потому, что она оказывает влияние на синхронную скорость вращения ЭД.

С снижением частоты, перегрузочная способность ЭД также снижается, чтобы этого не допустить, необходимо повысить величину напряжения U 1 . Номинал на который требуется повысить, зависит от типа привода. Если регулирование осуществляется с постоянным моментом нагрузки на валу, то напряжение требуется изменять пропорционально регулировки частоты (при снижении скорости). В случае увеличения скорости этого делать не стоит, напряжение должно быть на номинальных значениях, иначе это может причинить вред ЭД.
Если регулировка скорости осуществляется с постоянной мощностью электродвигателя, то изменение U 1 требуется осуществлять пропорционально корню квадратному изменения f 1 .
При настройки установок с вентиляторной характеристикой, требуется регулировать U 1 пропорционально квадрату изменения f 1 .
Регулирование способом изменения частоты, является наиболее лучшим вариантом для асинхронных двигателей на текущий момент, т.к при нем осуществляется регулирование скорости в достаточно широком диапазоне, без существенных потерь и падения перегрузочных способностей ЭД.
Обычно регулирование оборотов для двигателей на 220 вольт осуществляют с помощью тиристоров. Типовой схемой считается подсоединение электродвигателя в разрыв анодной цепи тиристора. Но во всех подобных схемах должен быть надежный контакт. И поэтому их нельзя применить в регулировании частоты вращения коллекторных двигателей, так как механизм щеток искусственно создает небольшие обрывы цепи.
Такой метод возможен только в многоскоростных асинхронных ЭД с короткозамкнутым ротором, т.к число полюсов этого ротора, всегда совпадает с полюсами статора.
В соответствии с формулой в начале страницы, скорость ЭД можно настраивать и изменением числа пар полюсов. Причём, в данном случае изменение скорости будет ступенчато, т.к как количество полюсов бывает только – 1,2,3,4,5.
Изменение их числа достигается с помощью переключения катушечных групп обмотки статора. При этом катушки коммутируются различными схемами, например “звезда - звезда” или “звезда – двойная звезда”. При соединении “звезда - звезда” получается изменение количества полюсов в соотношении 2:1. При этом будет постоянная мощность двигателя при переключении. При схеме “звезда – двойная звезда” изменяется количество полюсов в таком же соотношении, но еще обеспечивается постоянный момент двигателя.
Применение этого метода регулирования оправдано сохранением КПД и коэффициента мощности при переключении. Серьезным недостатком способа является более сложная конструкция ЭД, а также увеличение его стоимости.
| Статьи по теме: | |
|
Пирог с замороженной смородиной – пусть всегда пахнет летом!
Этот пирог можно печь с любыми ягодами, с малиной, вишней, ежевикой, так... Взбитые сливки в домашних условиях рецепт
Александр ГущинЗа вкус не ручаюсь, а горячо будет:) Содержание Каждая... Цветы, растущие в воде: обзор лучших
Декоративный пруд зачастую ассоциируют с украшенной прибрежной линией и... | |




